Platform
The project was programmed in C++ on an MSP430 microcontroller
Group Members: Nik Vanderveen, Nick Pellegrino, Bryan Mailloux
How it operates
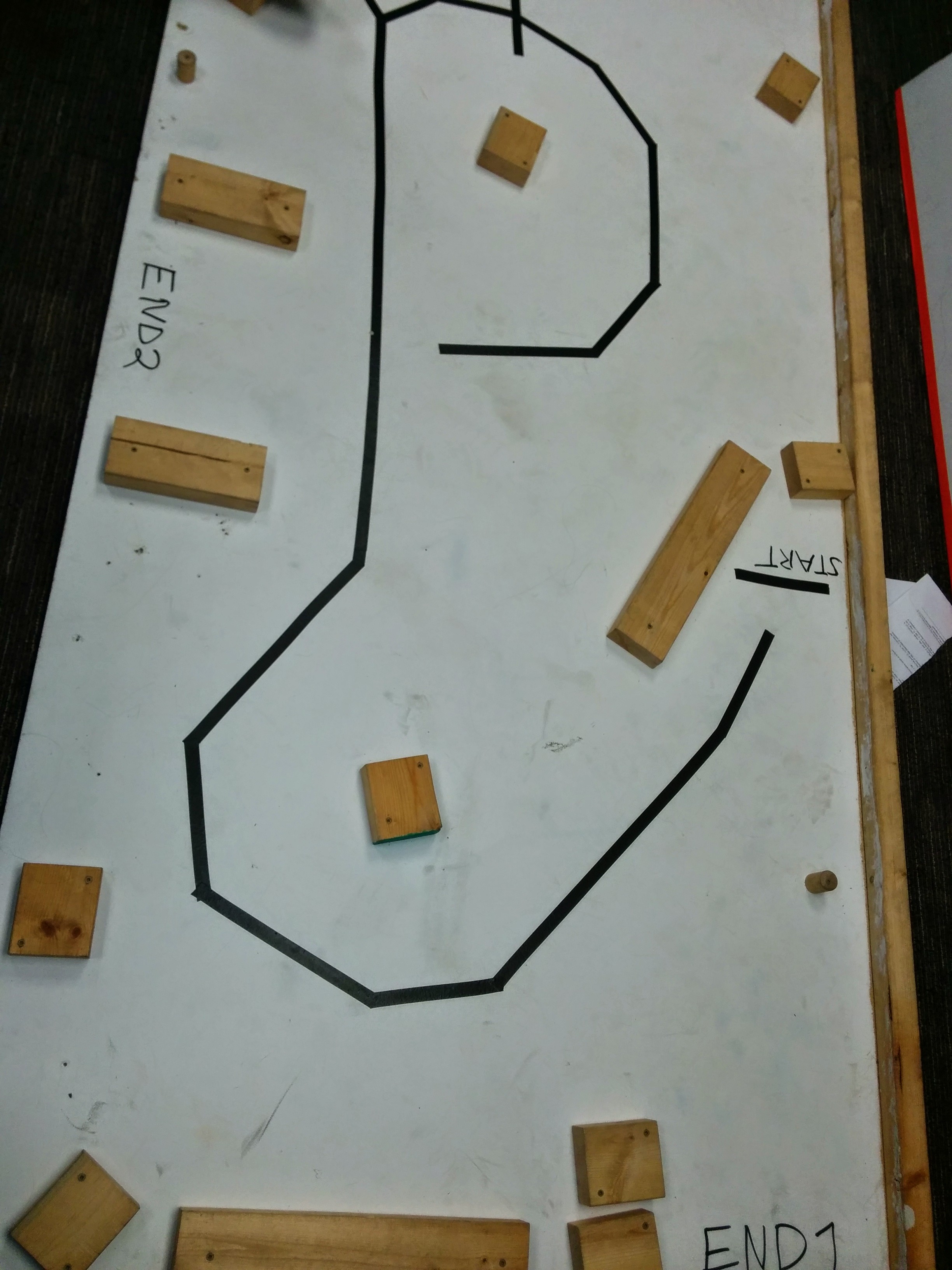
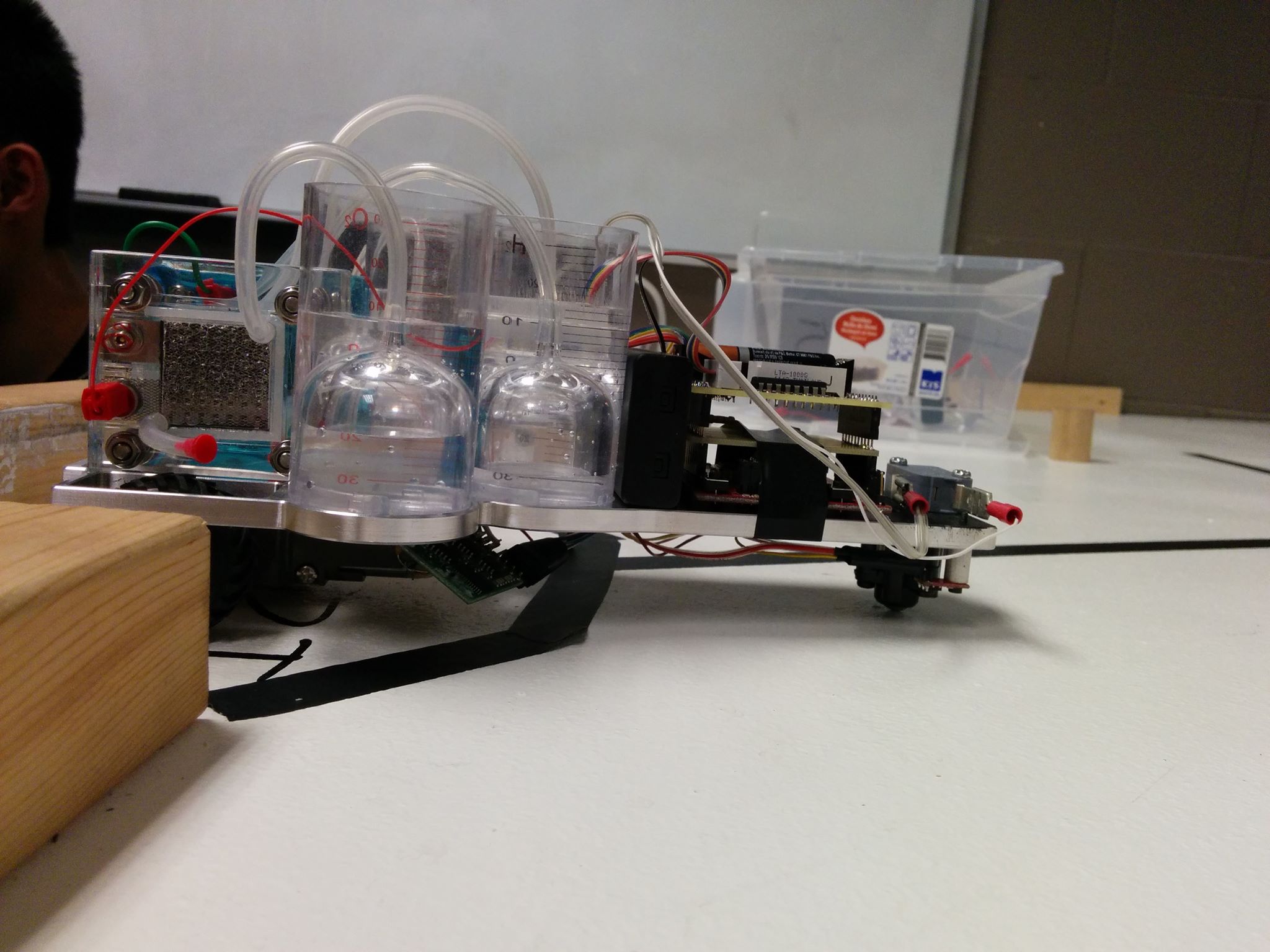
This project required our team to assemble a fuel cell car that could autonomously drive through obstacle courses. This was acheived by using an MSP430 Microcontroller which connects to the wheel motors and various sensors. The sensors include two brightness sensors for line following and a button on the front for collision detection. Various patterns of line following and collisions were used to program ways to get through three different obstacles courses.
The code is avliable on my github, here.
Additional pictures/video
One of the obstacle courses.